

Tag: LiDAR
-

Reading Time: 13 minutes – When satellite eyes meet machine minds, millennia-old secrets emerge from beneath jungle canopies and desert winds.
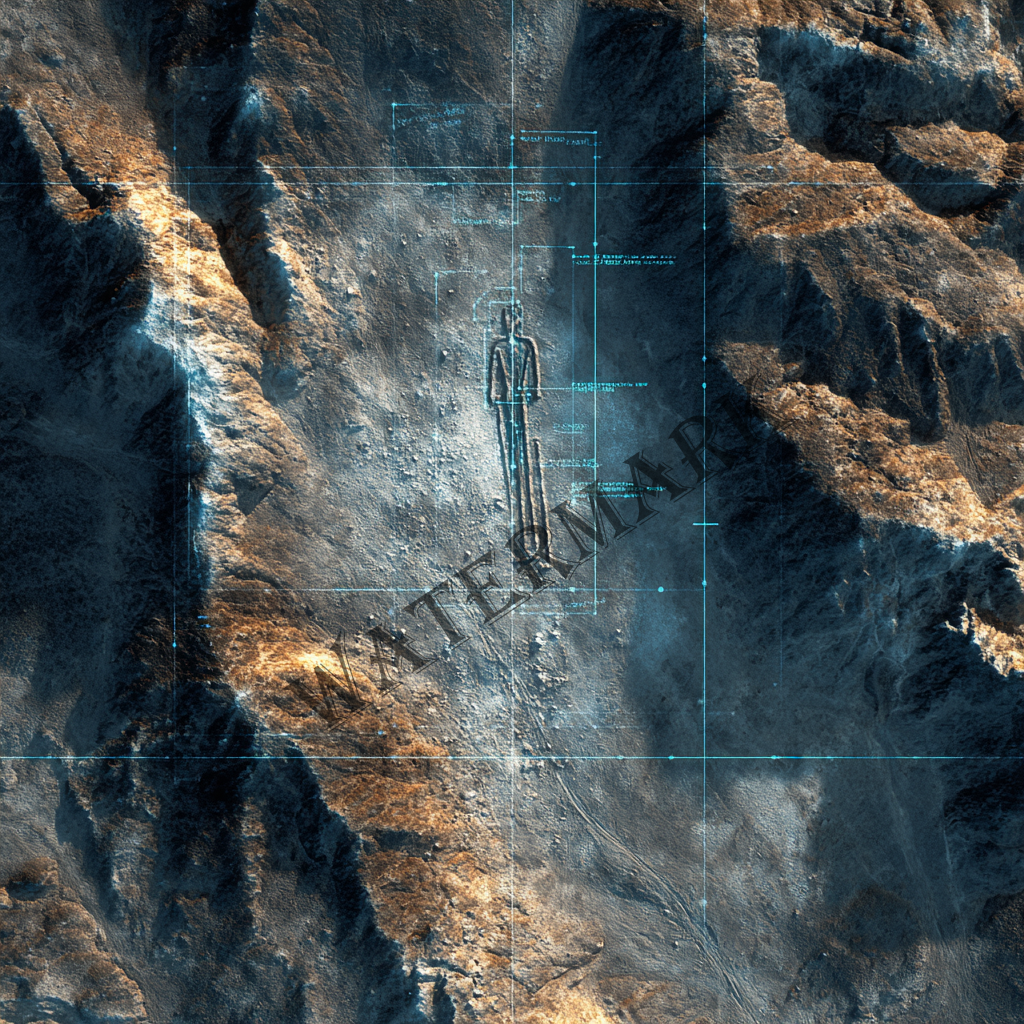
Reading Time: 13 minutes – When satellite eyes meet machine minds, millennia-old secrets emerge from beneath jungle canopies and desert winds.